Standardized Self-diagnostic Sensing Systems for Highly Automated Driving (S4DRIVE)
In the automotive industry, a continued strong innovation driver is the reduction of injuries and fatalities on the road. Advanced Driver Assistance Systems (ADAS) are now at the forefront of automotive innovation to prevent accidents. The ultimate goal is highly automated driving, where the vehicle takes over control, at least for some time. This requires guaranteed fail-safe operation. Guaranteed fail-safe operation in turn requires ADAS sensors and systems to be aware of their quality-of-service. Can the sensors still sense the traffic ahead, even when it snows? Do the combined sensors provide environment perception of a sufficient accuracy and reliability to define safe path and speed control strategies?
This project will identify critical determinants of radar and optical sensing reliability, will address these determinants with quality-of-service (QoS) concepts and methods both on ADAS sensor and sensor fusion level, and capture these in quality-of-service aware component interfaces and a service-based architecture, to support the development of configurable ADAS sensing systems with resultant high dependability.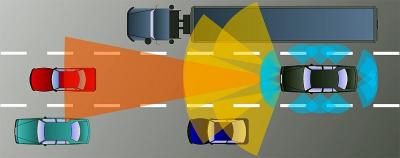
Project data
| Researchers: | Oleg Krasnov, Nikita Petrov, Rossiza Gourova |
|---|---|
| Starting date: | November 2014 |
| Closing date: | November 2018 |
| Sponsor: | STW |
| Partners: | TUD 3ME |
| Users: | TNO, NXP |
| Contact: | Alexander Yarovoy |